Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenKeyence Robot Vision
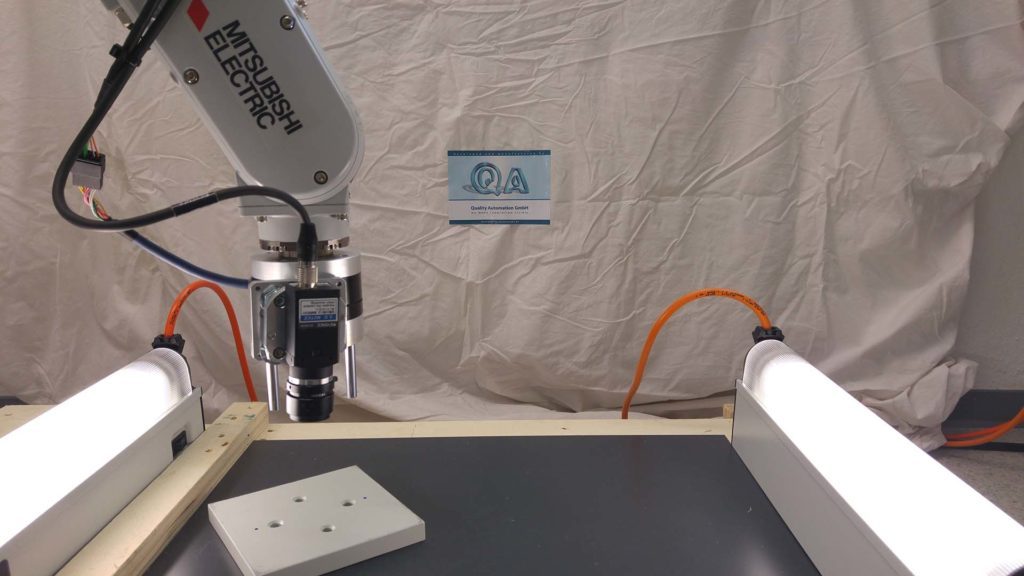
Die neue Funktion Robot Vision, die Keyence für seine Modellreihen CV‑X und XG anbietet, ermöglicht eine einfache kameragestützte Roboterführung. Es werden Schnittstellen für eine Vielzahl von Roboterherstellern angeboten, wodurch das Produkt auch in bestehende Anlagen nachträglich integriert werden kann. Die Firma Quality Automation GmbH hat in einem eigenen Versuchsaufbau die Funktion mit einem Roboter von Mitsubishi Electric umgesetzt und getestet.
Installation und Kalibrierung
Die Kamera kann je nach Anwendungsfall direkt auf dem Roboter oder fest in der Umgebung angebracht werden. Die Controller der Kamera und des Roboters werden über Ethernet verbunden und kommunizieren nach Ausführung eines Einrichtungsprogramms von Keyence direkt miteinander. So kann zur einfacheren Einrichtung der Roboter auch direkt über den Keyence Controller gesteuert werden. Sobald die Kamera richtig positioniert und die Verbindung zwischen Kamera und Roboter aufgebaut ist, können erste Bilder aufgenommen und mit der Bildverarbeitung begonnen werden. Um Bildpunkte in Positionsdaten umwandeln zu können, muss jedoch zunächst noch eine Kalibrierung durchgeführt werden. Dazu bietet Keyence eine automatische Kalibrierung an, die gegenüber manuellen Methoden die Vorteile hat, dass sie präziser, wiederholbar und unabhängig von Anwender und Aufstellort des Roboters ist. Ergebnis der Kalibrierung ist eine Vorschrift zur Umrechnung detektierter Punkte auf dem Kamerabild in kartesische Koordinaten für den Roboter.
Anwendungsmöglichkeiten
Im Versuchsaufbau der Firma Quality Automation GmbH wurde die Kamera am Roboter befestigt und eine Pick&Place Anwendung erfolgreich in Betrieb genommen. Neben der einfachen Positionserkennung von Objekten kann die Funktion aber auch für weitaus komplexere Aufgaben, wie der Qualitätskontrolle genutzt werden. Dazu können beispielsweise große Oberflächen vom Roboter abgefahren und untersucht werden. Die Position von Schäden wird direkt ausgegeben oder markiert. Auch die richtige Bestückung einer Leiterplatte kann mit diesem Verfahren durchgeführt oder geprüft werden. Außerdem eignet sich die kameragestützte Führung zum Fügen von Bauteilen, zum Beispiel zum Aufbringen von Kleber oder zum Festziehen von Schrauben. Wird die Kamera fest in der Umgebung montiert, kann mit der Funktion auch eine Greiferkorrektur durchgeführt werden. Dazu fährt der Roboter mit dem gegriffenen Objekt über die Kamera, die Greiferstellung wird analysiert und gegebenenfalls korrigiert.



{kind=link}
{kind=link}