Überaus erfolgreich hat Aaron Laufs im Rahmen seiner Bachelorarbeit die Auslagerung einer Regelung für Wickelanlagen auf eine speicherprogrammierbare Steuerung umgesetzt. Zur Analyse und Anwendung der entwickelten Software dient ein Wickelmodell mit Tänzer- und Zugkraftregelung, das mit Systemkomponenten unseres Premium-Systempartners Mitsubishi Electric ausgestattet wurde.
Motivation und Hintergrund
In einer vorangegangenen Bachelorarbeit wurde bei uns das Modell der Wickelanlage mit SPS-basierter Regelung entworfen und umgesetzt. Das vorhandene Testmodell wurde nun umgebaut und mit Soft- und Hardware der Firma Mitsubishi Electric ausgestattet. „Gemeinsam mit Mitsubishi habe ich eine Steuerungsbasis für Wickelapplikationen erarbeitet, die in Zukunft flexibel für verschiedene Motoren- und Anlagengrößen eingesetzt werden kann“, berichtet Aaron.
Aaron Laufs hat mit dieser Bachelorarbeit sein Studium an der Fachhochschule Aachen im Fachbereich Automatisierungs- und Antriebstechnik summa cum laude abgeschlossen. Nach seiner Ausbildung und erster Berufserfahrung entschied Aaron sich zum Vollzeitstudium, das ihn Mitte letzten Jahres zu QA geführt hat. Nach seinem Praxissemester und seiner Bachelorarbeit bei QA startet Aaron im kommenden Semester mit dem Masterstudium. Wir wünschen ihm an dieser Stelle viel Erfolg und freuen uns schon jetzt auf eine spannende Masterarbeit.
Der Testaufbau
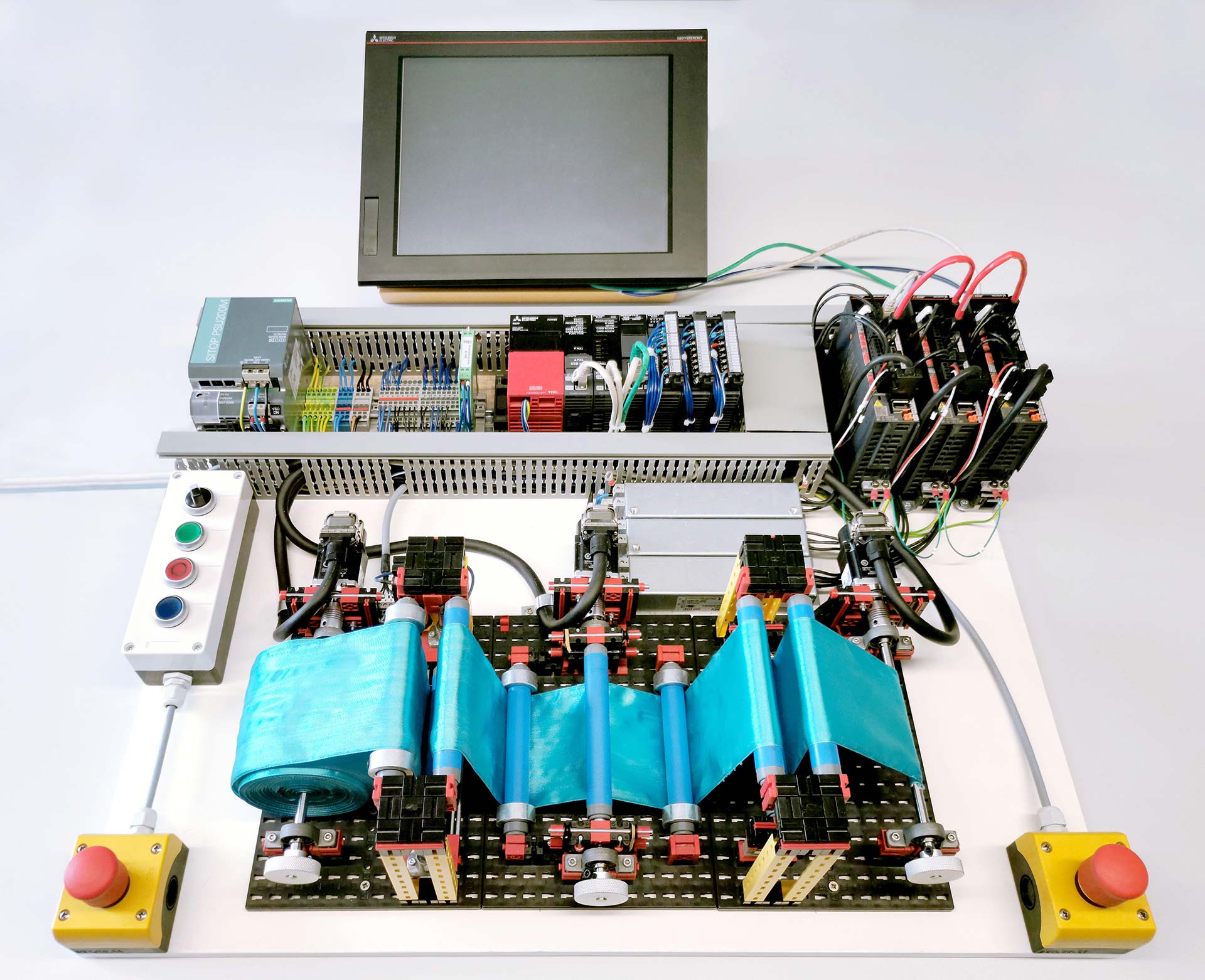
Das Modell aus Fischertechnik-Komponenten simuliert annährend reale Bedingungen. Eine Vorschubeinheit in der Mitte zwischen den beiden Wickeleinheiten gibt die Geschwindigkeit vor. Auf der linken Seite ist eine Tänzerregelung realisiert. Bei diesem Verfahren wird das Material hinter dem Wickler über einen vertikal frei beweglichen Tänzer geführt. Der Tänzer sollte möglichst immer in einer mittleren Position bleiben, die Regelung reagiert auf Abweichungen von dieser Position. Die Wegmessung erfolgt durch ein Schiebepotentiometer. Für das zweite Verfahren, die Zugkraftregelung, kommt eine feste Umlenkrolle zum Einsatz, an deren Fundament Kraftsensoren angebracht sind. Hier definiert der Zug auf die Rolle die Regelgröße.
Prozessregelung und Softwareaufbau
Die gesamte Prozessregelung erfolgt im digitalen Bereich und bringt damit gewisse Herausforderungen für eine funktionierende Regelung mit sich. Das Analogsignal wird zuerst hinsichtlich der Abtastzeit diskretisiert, was eine Momentaufnahme in festen Zeitabständen erlaubt. Im Anschluss erfolgt die Umwandlung in einen digitalen Wert. Insbesondere an die Datenverarbeitung und -übertragung werden große Anforderungen gestellt, da hierbei innerhalb der digitalen Regelung eine synchrone Verarbeitung der Daten sichergestellt werden muss. Nur so kann eine zeitkontinuierliche Ausgabe der Stellgröße erfolgen.
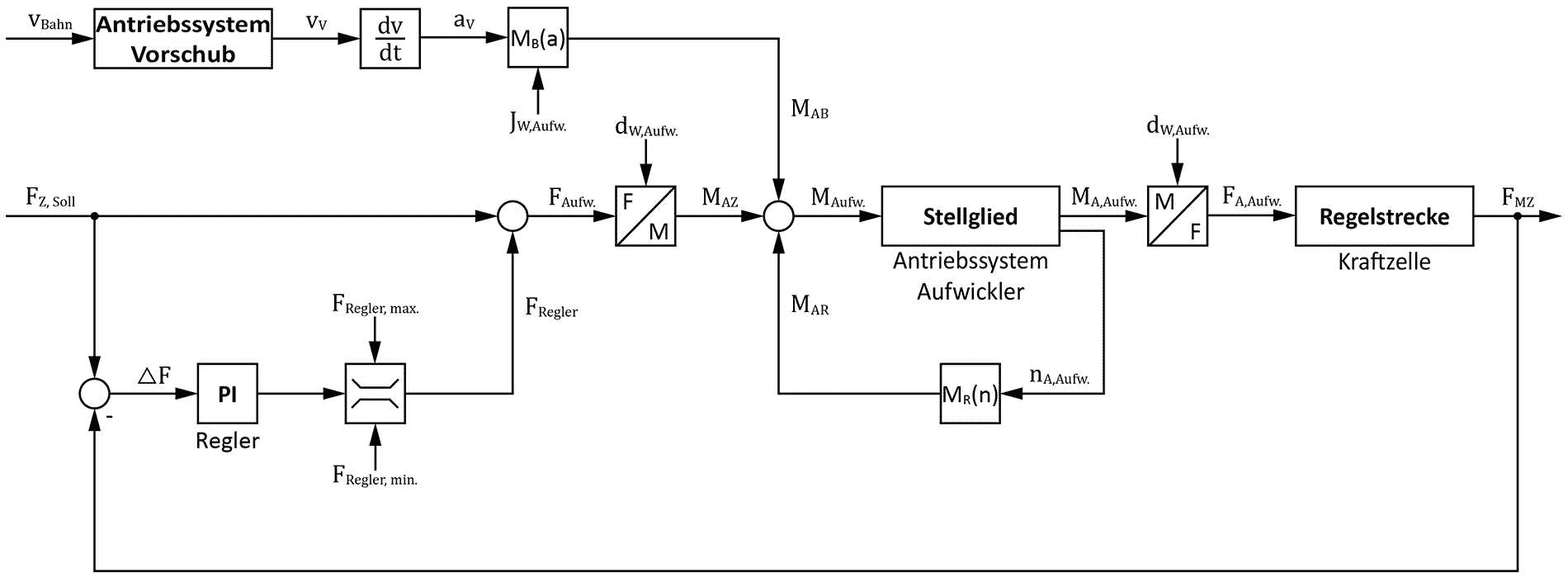
Die Tänzer- und Zugkraftregelung wurde als vorgesteuerte Regelung realisiert. Dies hat zum einen den Vorteil, dass der Regler entlastet wird, da nur noch vorhandene Regelabweichungen ausgeglichen werden müssen. Zum anderen bewirkt die Verbesserung des dynamischen Verhaltens ein schnelleres Reagieren auf Änderungen in der Führungs- oder Störgröße. Um die vorgesteuerte Regelung einsetzten zu können, mussten sämtliche physikalischen Zusammenhänge innerhalb der Applikation ermittelt werden. Dazu gehörten unter anderem der Wickeldurchmesser, die Bahngeschwindigkeit, die Zugkraft und das Drehmoment. Für die Abbildung der physikalischen Prozesse mussten neue Funktionsbausteine erstellt werden, die die Berechnung der benötigten Größen realisieren. Dazu gehören z.B. die Durchmesserberechnung der Wickel, die Reibungskompensation und die Drehmomentvorsteuerung. Der PI-Regler wurde mit einem Mitsubishi-Baustein realisiert.
{kind=link}
{kind=link}
Ergebnisse und weiterführende Anwendungsbereiche
Die Zugkraftregelung weist ein sehr gutes Regelverhalten auf, die Führungsgröße wird nach etwa einer Sekunde erreicht. Die Genauigkeit des Führungsverhaltens beträgt dabei ±(13,9 ± 8,66) mN (max. Regelabweichung ± Genauigkeit Mess-System). Die Tänzerregelung weist eine Genauigkeit von ± 3,2 mm auf. Hierbei ist zu beachten, dass der Tänzer ein träges System ist, sodass Änderungen der Stellgröße nur verzögert im System erkennbar sind. Durch das gute Regelverhalten wird eine schnelle Ausregelung von Störgrößen sichergestellt. Insbesondere die Zugkraftregelung gewährleistet eine hohe Genauigkeit der Zugkraft und sollte dementsprechend für solche Anwendungsfälle eingesetzt werden.
Im Hinblick auf die SPS-basierte Regelung bietet die entwickelte Applikation ein breites Spektrum an Anwendungsbereichen. Hierbei muss jedoch immer die Latenzzeit des Bussystems und der SPS in Bezug auf den geforderten Prozess berücksichtigt werden.
Darüber hinaus können die entwickelten Funktionsbausteine auch auf anderen Steuerungsplattformen eingesetzt werden, was durch die quellcodeoffene Programmierung ermöglicht wird. Die Entwicklung der essenziellen Bausteine für die Applikation wurde herstellerunabhängig realisiert. Des Weiteren kann eine Wickelcharakteristik implementiert werden, welche die Vorgabe der Zugkraft in Abhängigkeit zum Wickeldurchmesser ermöglicht. Insbesondere im Hinblick auf die Batterieproduktion kann der Einsatz von prismatischen Wicklern erforderlich sein. Hierfür könnte eine Vorsteuerung für nicht kreissymmetrische Wickler anhand des realen Modells entwickelt und erprobt werden.
{kind=link}
{kind=link}
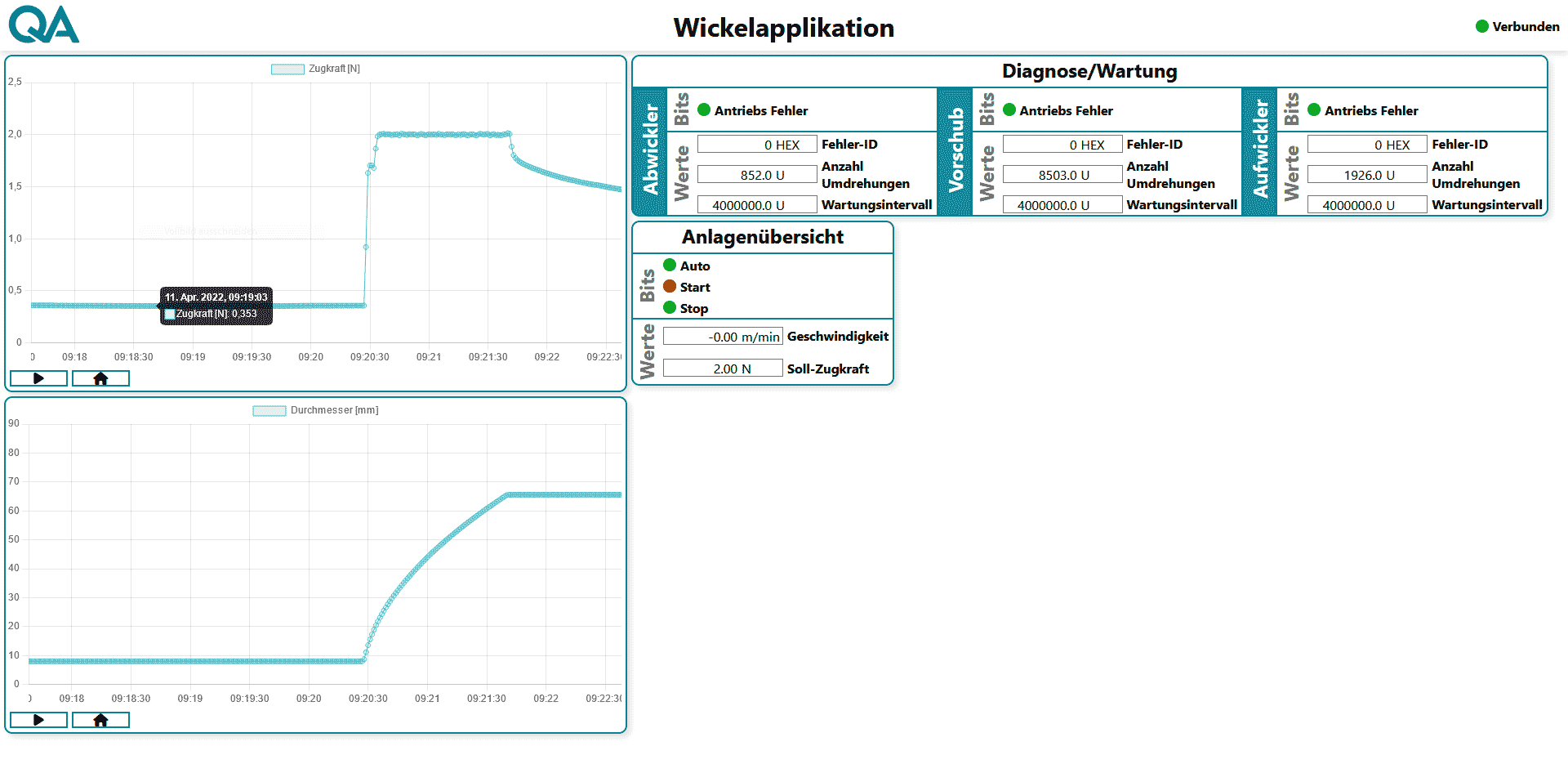
Prozessdatenüberwachung durch MQTT-Anbindung
Durch die Implementierung einer MQTT-Karte wurde über Mosquitto als MQTT-Server eine Prozessdatenüberwachung per Weboberfläche geschaffen. Auf einer mit HTML, CSS und JavaScript programmierten Website können unter anderem die Zugkraft, der Durchmesser und der Anlagenstatus überwacht werden.