Die Zielsetzung
Als Certified Excellence Solution Partner und offizieller Systemintegrator der Firma Bosch Rexroth ist es für uns von großem Interesse, die neue ctrlX CORE Steuerung bei unseren Kunden höchst effizient einsetzten zu können. Die Zielsetzung der Bachelorarbeit war es, einen industrietauglichen Standard zu entwickeln, um ungeregelte und geregelte Antriebe mit der ctrlX steuern zu können. Ein Steuern und Überwachen der Antriebe sowie Schnittstellen zum HMI mit grundlegenden Funktionalitäten, wie Betriebsarten, Benutzerverwaltung und ein Alarmhandling , sollten integriert werden.
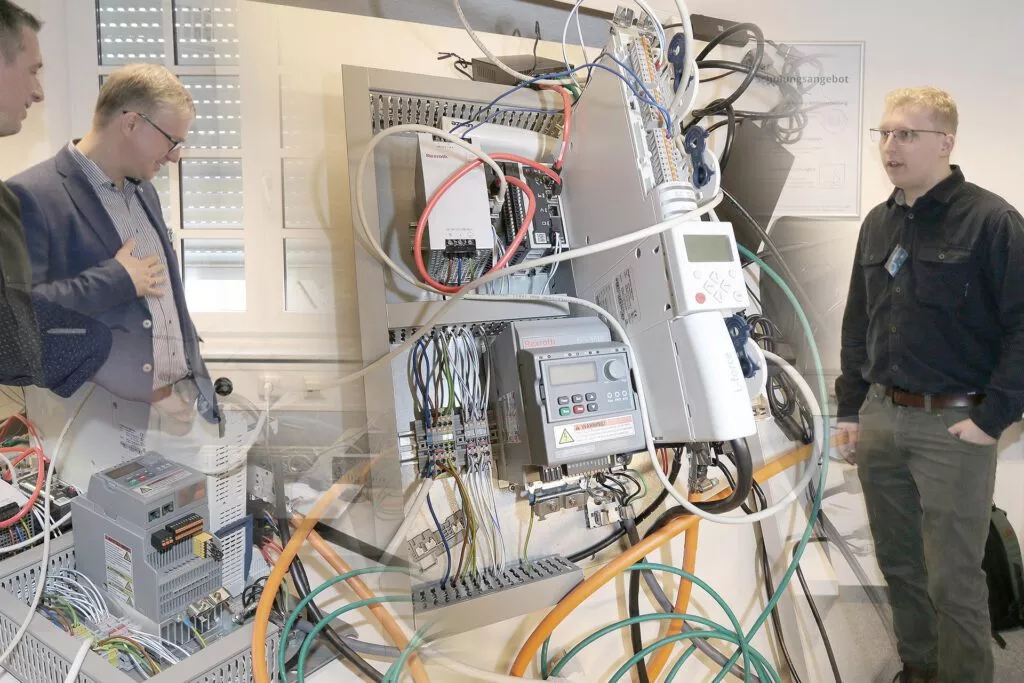
Der Projektaufbau
Die entwickelte Software sollte in einem Laboraufbau im Hause der Quality Automation GmbH eingesetzt und getestet werden. Der Aufbau enthält die ctrlX CORE Steuerung mit einem QA-Basisprojekt inklusive der neu entwickelten Funktionsbausteine, ein HMI-Panel mit eigens entwickelter Benutzeroberfläche im QA Corporate Design und einen Drehstrommotor mit entsprechendem Bosch Frequenzumrichter (EFC 5610). Zusätzlich wurde ein ctrlX Drive Servomotor mit Servoumrichter in dem Laboraufbau installiert.
Der entwickelte Funktionsbaustein beinhaltet alle in der Industrie notwendigen und gängigen Funktionalitäten. Wechsel zwischen Hand- und Automatikbetrieb, das Einlesen von digitalen und analogen Eingängen und von Soll- und Istwerten sowie Resets und Notstopps sind abgebildet.

Projektergebnis
Der Umrichter lässt sich wie gewünscht über die ctrlX Steuerung ansteuern. Für interne Zwecke wurden alle Variablen und der FB sehr genau dokumentiert. Die Betriebsarten absolute Positionierung, relative Positionierung, Geschwindigkeitsregelung und Drehmomentregelung wurden erfolgreich implementiert. Bei der Positionsregelung wird nach dem Startbefehl eine Sollposition mit Rampenprofil angefahren. Das Rampenprofil enthält Beschleunigung, Verzögerung und eine Maximalgeschwindigkeit. Der Sollwert wird entweder absolut oder relativ als Positionsoffset vorgegeben. Bei der Geschwindigkeitsregelung wird nach dem Startbefehl eine Sollgeschwindigkeit mit Rampenprofil angefahren. Das Rampenprofil enthält Beschleunigung und Verzögerung. Die Drehmomentregelung lässt sich kontinuierlich steuern. Das Sollmoment wird in Echtzeit aufgebracht. Somit lassen sich Drehmomentverläufe realisieren. Des Weiteren wurde ein Baustein entwickelt, um die Servos zum Antrieb einer Linearachse zu verwenden. Dieser FB nutzt wiederum den Servo-FB. Die Achse kann sich in der Initialisierung selbst vermessen, wodurch sich die Achse relativ und absolut positionieren lässt und auch eine Geschwindigkeitsvorgabe möglich ist. Außerdem wurde eine HMI-Benutzeroberfläche erstellt, mit der das SPS-Programm gesteuert und überwacht werden kann. Enthalten sind verschiedene umschaltbare Menüs, eine Benutzerverwaltung und eine Alarmverwaltung mit Quittierfunktion.


