Aufgabenstellung und Zielsetzung
Die Softwareentwicklung und HMI-Programmierung des 3-dimensionalen Pick & Place Portals war Bestandteil der Bachelorarbeit von Frau Eva Hoffmann zu ihrem Abschluss „Bachelor in Automation“ an der HELMo Saint-Laurent Haute-École Hochschule in Liège, Belgien. Dabei wurde ein besonderes Augenmerk auf innovative Steuerungstechniken sowie auf die nahtlose Integration moderner Benutzeroberflächen gelegt, um eine optimale Benutzerfreundlichkeit und Effizienz zu gewährleisten.
Unterstützung erhielten wir dabei von der deutschen Mitsubishi Electric-Zentrale in Ratingen, die mit ihrer umfangreichen Expertise und den zur Verfügung gestellten Hard- und Softwarekomponenten zum Erfolg des Projekts beigetragen hat. Besondere Beachtung schenkten wir der Implementierung hoher Leistungs- und Funktionsstandards, um die anspruchsvollen Anforderungen der industriellen Automatisierung zu erfüllen.
Ein entscheidender Vorteil des Systems ist seine volle Kompatibilität mit den Erweiterungsmodulen und Peripheriegeräten der iQ-F-Serie, was eine einfache Erweiterung und Anpassung an spezifische Anwendungsfälle ermöglicht. Diese Kompatibilität gewährleistet eine flexible Skalierbarkeit und eine kosteneffiziente Integration in bestehende Produktionsumgebungen. So konnten sowohl innovative technische Lösungen als auch wirtschaftliche Effizienz erfolgreich kombiniert werden.
Modellaufbau und Komponenten
Das Messemodell ist eine 3-dimensionale, geschlossene Zelle, die den Betrieb eines Pick & Place Systems mit Vakuumgreifer demonstriert. Dieses System ist dazu ausgelegt, kleine quadratische Metallwürfel zu bewegen. Zur Steuerung des Prozesses wird eine Lösung für insgesamt sechs Achsen implementiert. Der Pick & Place Vorgang erfolgt gemäß einer vorprogrammierten Abfolge, bei der die Würfel innerhalb der Zelle kreisförmig bewegt werden. Ein in die Vorderseite der Zelle integrierter Industrie-PC dient zur Darstellung von Bewegungsdaten und Systemzuständen. Zudem ermöglicht er die Visualisierung der vorausschauenden Wartung, einer zentralen Funktion der Mitsubishi Drives. Die vier kreuzförmig an der Oberseite angeordneten Achsen bewegen die Würfel seitlich von links nach rechts, um sie auf dafür vorgesehene Tabletts zu platzieren. Diese Tabletts werden anschließend durch zwei am Boden montierte Achsen von vorne nach hinten weitertransportiert, um dann an der nächsten Station erneut seitlich abgelegt zu werden. Das Messemodell ist so konzipiert, dass es seine Leistungsgrenzen erreicht, um zu demonstrieren, dass trotz der kompakten Bauweise der SPS und der zugehörigen Module eine präzise Steuerung der sechs Achsen möglich ist. Alle im Betrieb verwendeten Module werden abschließend im unteren Bereich der Zelle sichtbar präsentiert.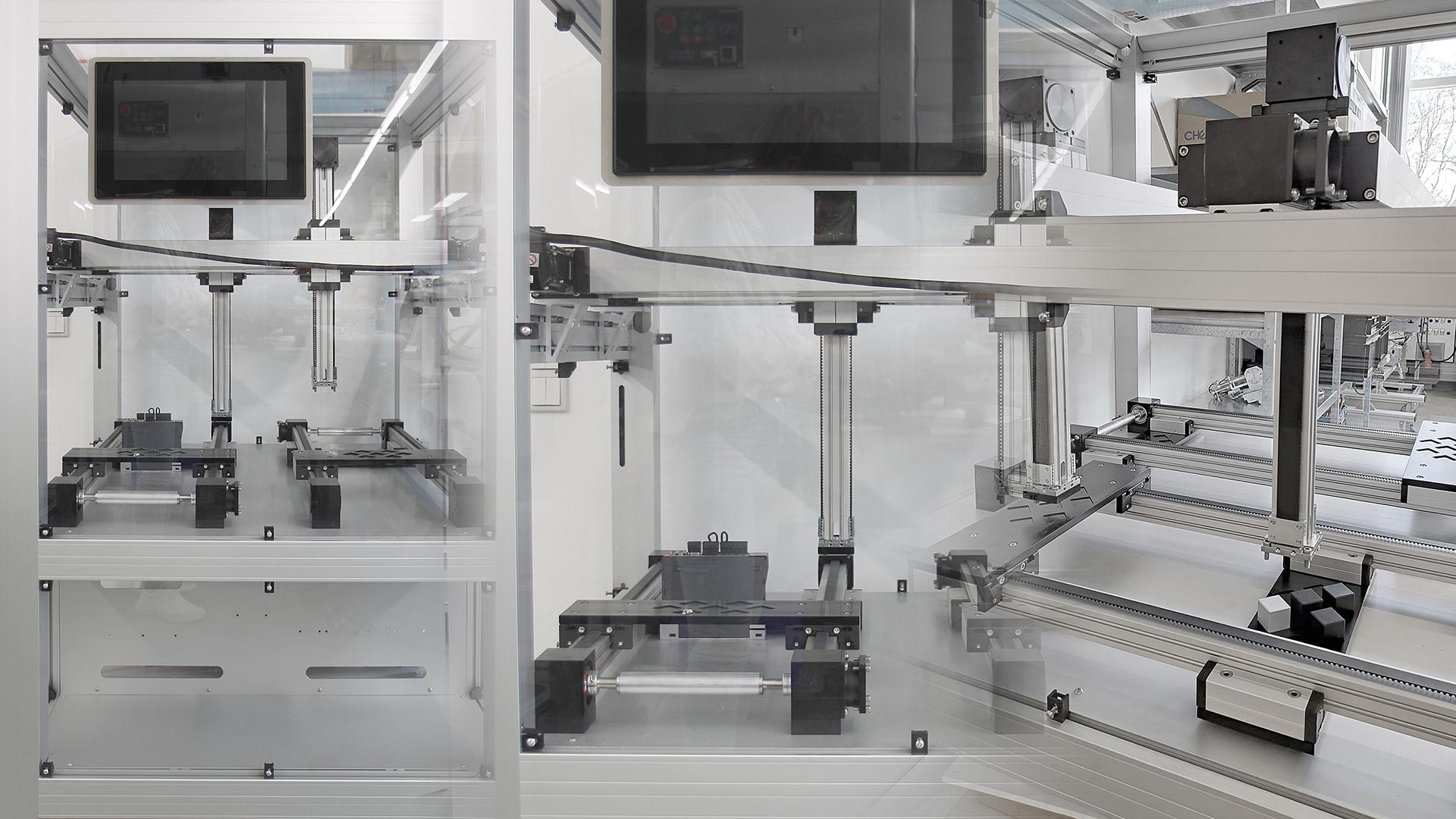
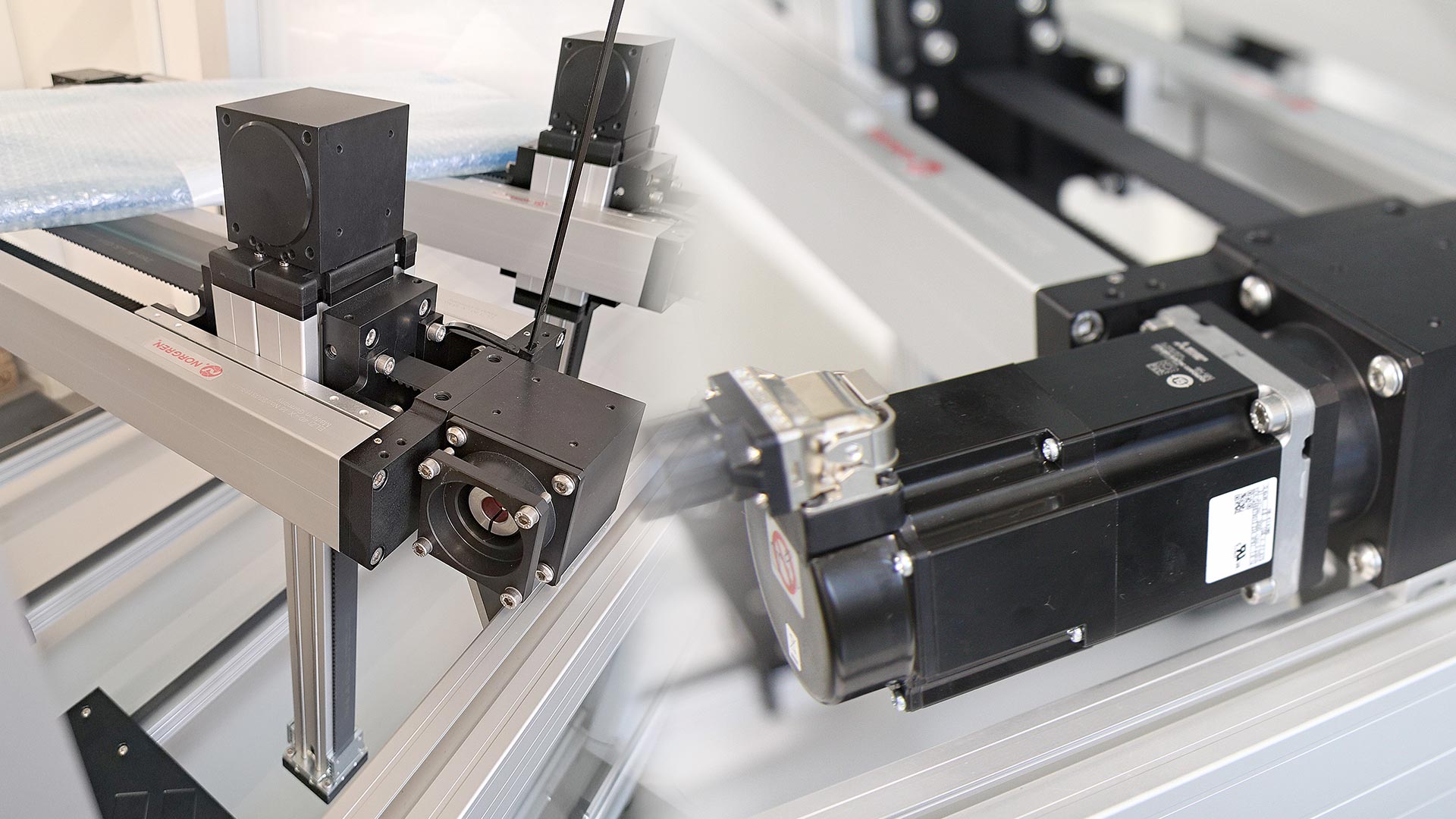
Das sog. ELZI-Linearachssystem zeichnet sich u.a. durch die Fähigkeit der Achse aus, sich zweidimensional zu bewegen, ohne dass eine Verschiebung der Motoren erforderlich ist. Dieser Ansatz bietet den Vorteil, dass lediglich kleine Massen bewegt werden müssen, was die Möglichkeit eröffnet, höhere Beschleunigungen zu erreichen.
Das Steuerungsprinzip des ELZI-Systems ist mit dem einer sogenannten H-Achse vergleichbar. Bei Bewegungen von links nach rechts drehen sich die beiden feststehenden Motoren synchron in dieselbe Richtung. Bei Bewegungen von oben nach unten hingegen drehen sie sich in entgegengesetzte Richtungen. Dies wird durch die Konstruktion ermöglicht, bei der der Zahnriemen am Endpunkt der Z-Achse fixiert und gespannt ist. Der Antrieb erfolgt über einen umlaufenden Riemen, der durch mehrere Umlenkpunkte geführt wird.